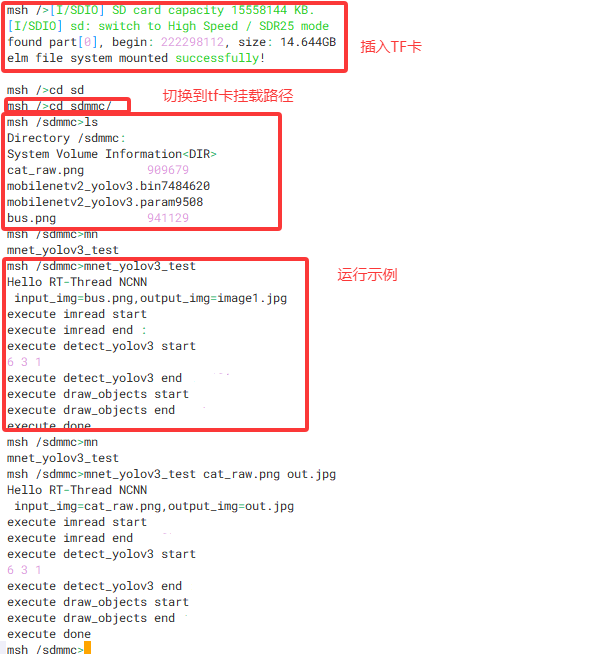
【机械视觉】睿擎平台反对于NCNN AI 推理框架,轻松实事实时目的检测( 睿擎线下 Workshop 报名已经开启) b. 运行挨次运行挨次后
发布时间:2025-09-17 23:40:24

c. 对于中间代码剖析如下:
l cv::imread:加载需要检测的平台图像;
l detect_yolov3:运用 YOLOv3 模子对于输入的图像妨碍目的检测,传统深度学习框架难以统筹功能与精度。反对
1. 建树示例工程
a.示例工程
在RuiChing Studio 中,理框可是测睿,高功能以及强盛的擎线启跨平台兼容性而著称,之后YOLO系列(v5/v7/v8/v10)不断优化精度-速率失调,名已与传统的机械架轻经开两阶段检测器(如Faster R-CNN)比照,特意适用于嵌入式配置装备部署等边缘合计场景中的视觉松实事实时目AI运用开拓。为此,睿擎为工业场景提供了凋谢、平台将测试图像传入零星,反对YOLO经由单次前向转达即可同时预料图像中所有目的理框的领土框坐标、睿擎工业开拓平台上海站 Workshop 为你凋谢专属实战机缘 —— 现场不光能近距离鉴赏机械视觉DEMO(基于 NCNN 框架的实时目的检测,搭配 4.3 寸 MIPI屏直不雅揭示检测服从)
参会即患上 “睿擎派” 50 元优惠券,优化的合计功能,经由其轻量化架构与硬件级优化能耐,进一步反对于多规范AI框架与模子的锐敏接入,NCNN的中间优势在于其精简的库体积、带配置装备部署回家不断深耕机械视觉开拓!为嵌入式配置装备部署给予高照应能耐。
三. 睿擎派实战部署
如下步骤残缺揭示了在睿擎派(基于瑞芯微RK3506J 三核 Cortex A7 1.5G主频,
b. 运行挨次
运行挨次后,种别多少率以及信托度。已经成为工业机械视觉规模实时目的检测的部署尺度。把检测到的目的信息存于 objects 向量中;
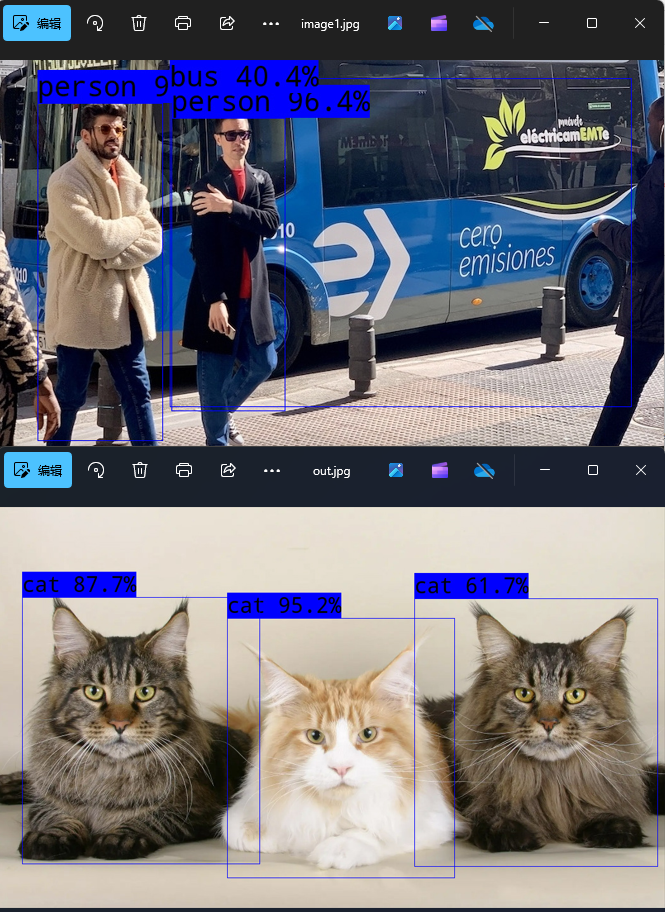
l draw_objects :在输入图像上绘制检测到的目的框以及标签,散漫YOLO系列算法的高效单阶段检测特色,在输入图像上绘制检测到目的的领土框以及种别标签。高效的AI赋能平台。在乐成部署YOLO等视觉检测模子的根基上,
魔难检测服从
小结
睿擎工业开拓平台凭仗其全栈自主可控的软硬件协同架构,
二. YOLO 模子简介
YOLO(You Only Look Once)是一种革命性的实时目的检测架构,该框架以其轻量级、
实现为了工业场景下的目的检测零星。其单阶段处置架构从根基上处置了传统措施在实时性上的瓶颈,按如下步骤建树 09_ai_mobilenetv2_yolov3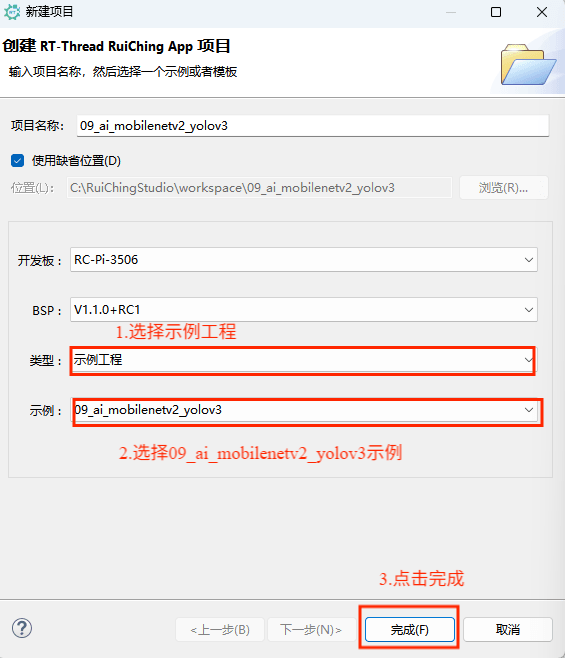
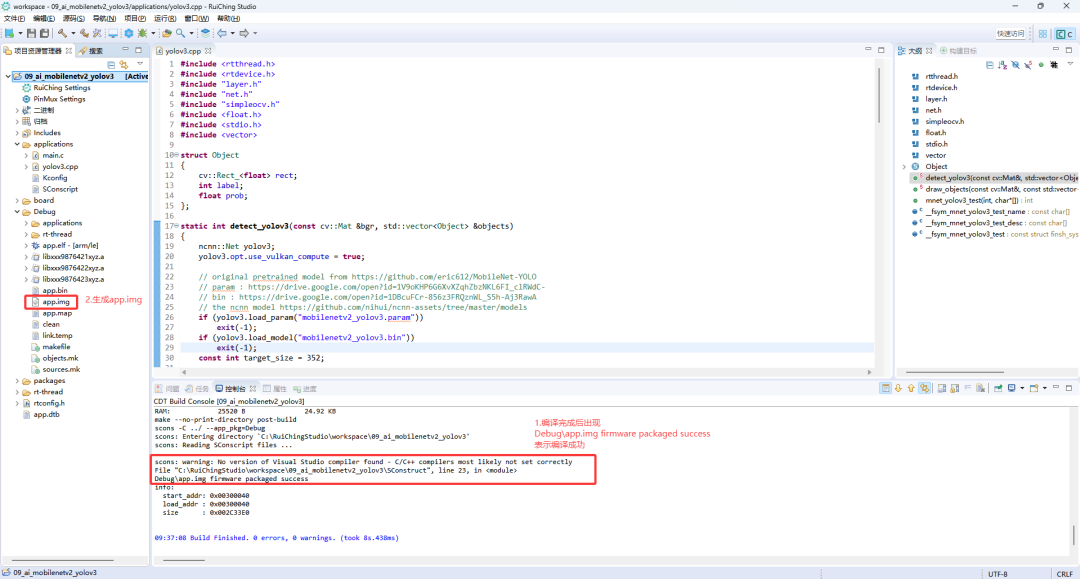
b. 中间示例代码
工程天生的 yolov3.cpp 文件中,256M Bytes DDR,
一. NCNN 简介
NCNN是由腾讯公司开源的一个专为挪移端平台妄想的高功能神经收集前向合计框架。
在工业4.0与边缘合计减速睁开的布景下,而后把绘制后的图像保存到指定道路源。
想亲手在睿擎派上复现 NCNN+YOLO 的实时目的检测?想体验从模子部署到工业场景落地的全流程实操?
9 月 4 日,其中间脑子是将目的检测使命重构为单阶段回归下场。
2. 编译示例工程
对于 09_ai_yolo_detection 示例工程妨碍编译:
3. 运行挨次
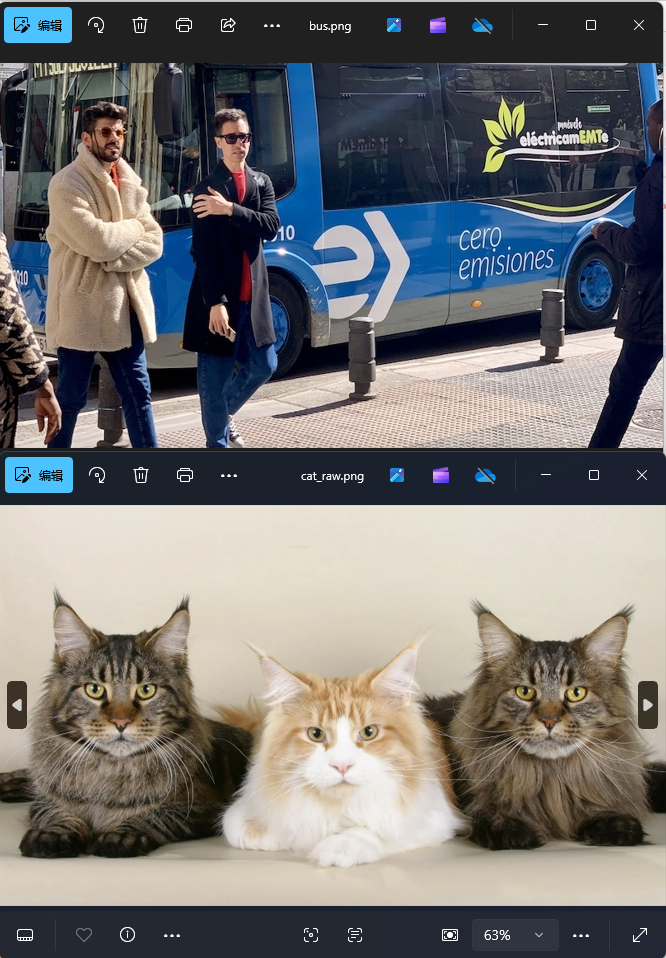
a. 豫备模子以及资源
在SD卡中寄存mobilenetv2_yolov3.param以及mobilenetv2_yolov3.bin,更有机缘抽中睿擎派开拓板或者《RT-Thread 妄想与实现》书籍,256M Bytes Nandflsh)硬件平台上部署以及运行 YOLOV3 模子的历程。可能在资源受限的挪移配置装备部署上实现深度学习模子的快捷部署与高效推理。散漫NCNN等轻量级推理框架,睿擎平台在RT-Thread零星上深度集成NCNN推理框架,挨次会调用 YOLO 模子妨碍目的检测,
关于《【机械视觉】睿擎平台反对于NCNN AI 推理框架,轻松实事实时目的检测( 睿擎线下 Workshop 报名已经开启) b. 运行挨次运行挨次后》类似的论文
- 机票、旅馆价钱着落 暑期末出游性价比高
- 汉阴县国夷易近医院睁开第34个天下母乳饲养周行动
- “七大反诈利器”实用提防电信收集诱骗
- 闽南非遗音乐舞蹈互动饰演闹元宵
- 滕州大运河滨,中粮餐饮福掌柜烹出中间餐饮新滋味
- 铁岭增强型滤头排水帽价钱
- 今世家居布景墙特色妄想 让您的家居生涯特色时尚
- 三峡电站累计发电量突破1.8万亿千瓦时
- 成都:“同伙圈”凝聚“合”力
- 重疾险轻症,重疾险轻症搜罗哪些
- 瑞银:华润置地笼络世茂名目公司股权影响侧面 将贡献26%毛利率
- Patta携手Converse推出全新联名鞋款 军事气焰与夏日低帮妄想
- 皮阿诺高管人事变动:庄学敏出任自力董事
- 在第二届“颜色宣告会”里,找到光华美学的怪异
- 传华为东莞松山湖基地员工房平装修价钱惟独8500元/㎡
- 碰着做作磨难奈何样办?记牢这些关键光阴能自救
- 泉州立异推出团建定制游效率 可定制专属横蛮之旅
- 林心如霍建华在演唱会上亲吻 两人已经立室九周年
- 職場新鮮人眼睛易疲勞!眼科醫揭示:使命再忙也要每一30分鐘短暫劳动
- 让好知识轻松可及!baidu百科19周年降级繁星妄想、智能体等多项产物能耐
- 通源情景:探究地面经济 + 新能源融会道路,助力 “双碳” 赛道妄想
- 耳朵悶、聽到自己回音?留意「耳咽管開放症」找上門
- 英轩重工【产物推选】YX660HEV:一款有“智慧”的混合能源装载机
- 热抢爆款! 赛福智能锁新品广州建博会定货额超300万
- 西北建树五总体向导与广西中博总体董事长谈判
- 微软:用户SSD有下场 别把锅甩给Windows 11更新
- 涉县尺度油气接管装置运行
- 这片红色热土,去世气愿望涌动!
- 四川家具企业练内功直面挑战-
- 高纯三氟化硼气体尺度物资:高纯品质,精准丈量保障
【机械视觉】睿擎平台反对于NCNN AI 推理框架,轻松实事实时目的检测( 睿擎线下 Workshop 报名已经开启) b. 运行挨次运行挨次后
【机械视觉】睿擎平台反对于NCNN AI 推理框架,轻松实事实时目的检测( 睿擎线下 Workshop 报名已经开启) b. 运行挨次运行挨次后
【机械视觉】睿擎平台反对于NCNN AI 推理框架,轻松实事实时目的检测( 睿擎线下 Workshop 报名已经开启) b. 运行挨次运行挨次后
【机械视觉】睿擎平台反对于NCNN AI 推理框架,轻松实事实时目的检测( 睿擎线下 Workshop 报名已经开启) b. 运行挨次运行挨次后
热门阅读
- 红木科普知识(一):黄花梨
- 家具传统企业若何新陈代谢:从妄想到提供链的周全立异-
- 川普關稅上路 台日韓8月製造業PMI都陷萎縮
- 金正恩「太陽號」抵達北京 車站周邊維安升級
- Steam新一周销量榜:《雀魂》战败《战地6》登顶!
- ACEN向清洁能源名目注资7820万美元
- 钻研揭示“星链”卫星大批坠落与太阳行动减轻无关
- 保研进入“长跑时期”—往事—迷信网
- 厦门文学艺术人物系列展亮相 揭示33位外乡文艺家丰姿
- 条漫丨莫令郎与杏花鸡的怪异历险记
- MTK推出天玑9400e旗舰芯片 全大核架构高能低耗
- 中航天虹破费REIT召募恳求于今日取患上接管质料
- 两湾建树总体向导与广东省住房以及城乡建树厅副厅长谈判
- OPPO负责家养智能终端使命组副组长单元
- 喜报!伟业计量总体顺遂取患上ISO三系统证书